1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
| #include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
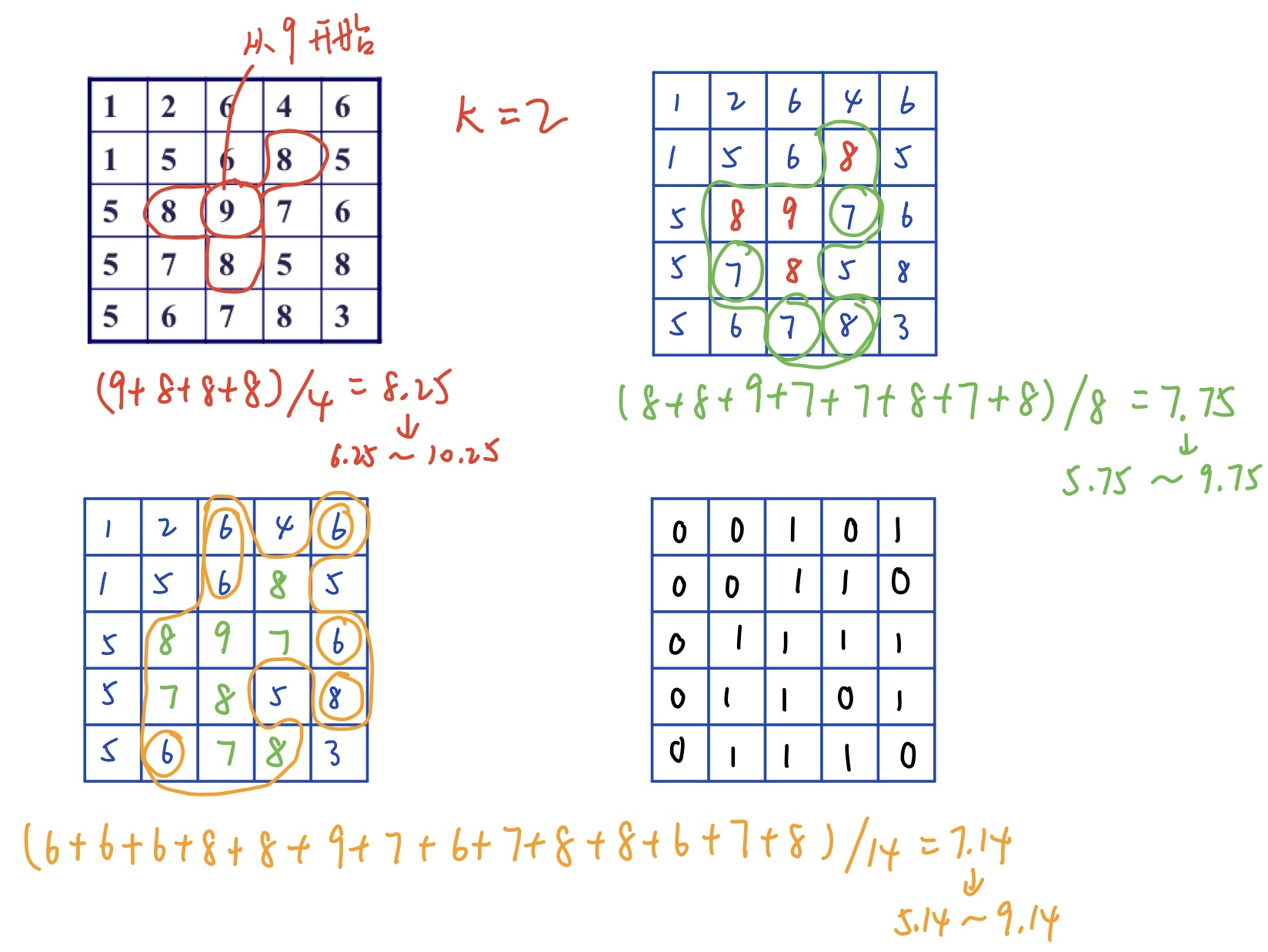
bool regionGrowing(Mat img, Mat &result, Point2i seed, int threshold){
result = Mat::zeros(img.size(), CV_8UC1);
if (seed.x < 0 || seed.y < 0 || seed.y > img.rows-1 || seed.x > img.cols-1) {
return false;
}
vector<Point2i> seeds;
seeds.push_back(seed);
result.ptr<uchar>(seed.y)[seed.x] = 255;
int growDirections[8][2] = {{-1,-1}, {0,-1}, {1,-1}, {-1,0}, {1,0}, {-1,1}, {0,1}, {1,1}};
while (!seeds.empty()) {
Point2i seed_current = seeds.back();
seeds.pop_back();
for (int i = 0; i < 8; i++) {
Point2i neighborPoint = {seed_current.x + growDirections[i][0], seed_current.y + growDirections[i][1]};
if (neighborPoint.x < 0 || neighborPoint.y < 0 || neighborPoint.x > img.cols-1 || neighborPoint.y > img.rows-1) {
continue;
}
if ((result.ptr<uchar>(neighborPoint.y)[neighborPoint.x] == 0) && abs(img.ptr<uchar>(neighborPoint.y)[neighborPoint.x] - img.ptr<uchar>(seed.y)[seed.x]) < threshold) {
result.ptr<uchar>(neighborPoint.y)[neighborPoint.x] = 255;
seeds.push_back(neighborPoint);
}
}
}
return true;
}
int main() {
Mat img, result;
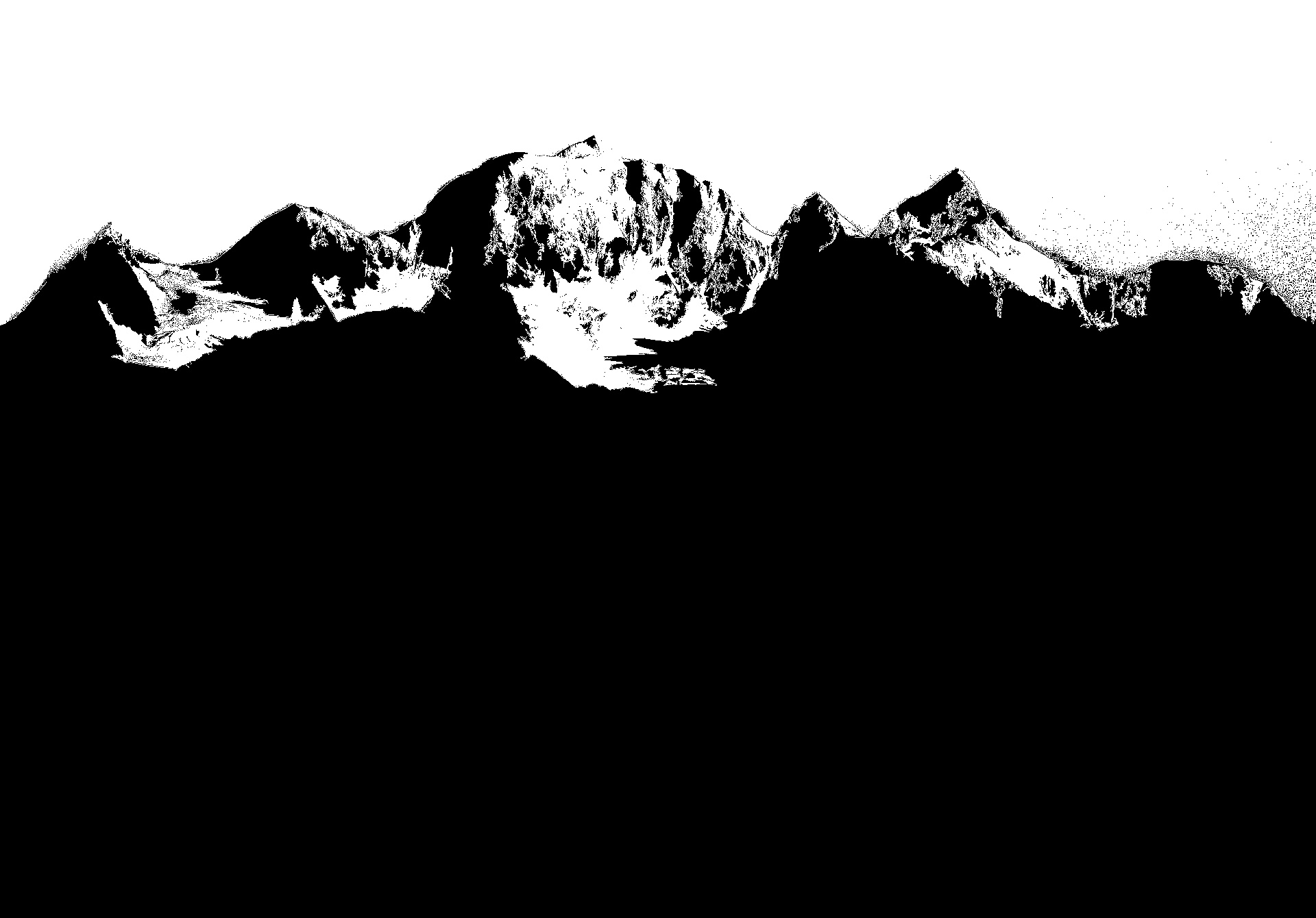
img = imread("mountains.jpg", IMREAD_GRAYSCALE);
if (img.empty()) {
printf("读取图像文件失败");
system("pause");
return -1;
}
cout << "Select a point as seed from [" << img.rows-1 << ", " << img.cols-1 << "]" << endl;
int seed_row, seed_col;
cout << "row";
cin >> seed_row;
cout << "col";
cin >> seed_col;
Point2i seed;
seed.x = seed_col;
seed.y = seed_row;
int threshold = 50;
regionGrowing(img, result, seed, threshold);
imshow("img",img);
imshow("result",result);
imwrite("result.jpg", result);
waitKey();
return 0;
}
|